
Engineers designing their own motor drives must accomplish many different tasks, from selecting a microcontroller to choosing the right connectors and power supply for mechanical integration. Yet knowing the right questions to ask before beginning a design, and what decisions must be made at each point in the design cycle, is not always self-evident. This article uses a powered knee prosthesis as an example of how and why certain decisions were made in the development of its motor drive.

Power Knee is the first commercially available prosthetic knee joint that mimics natural muscle activity via active motors. It provides the necessary power and active motion for upward movement such as on stairs or inclines. It delivers powered extension when standing, active flexion and extension during walking, and controlled resistance when descending.
The design specification took a long time to become what it is today. Early in the process, there was little to support Össur’s investigative work and no guidance available on how to put together this type of mobility device. The Össur design team made many prototypes and products, allowing them to learn the fundamentals of motion control and to create a design spec that is unique in how it solves core problems, such as power density, efficiency, and functional performance.
Amputee gait differs in many ways from non-amputee gait. In addition to achieving proper power density and efficiency, connecting the prosthesis to the residual limb is a known challenge, and designing a knee joint that generates enough positive mechanical power makes the challenge even greater. The design spec had to take into account all aspects so that intent recognition, motion control, and power density are aligned together, in software, firmware, and hardware, and usable gait function could be achieved.
Although motorized prosthetics are not considered life-critical systems such as pacemakers, using an actuator as a part of the body demands a high level of device durability and reliability. Actuators and their control systems must also fit within the dimensions of natural limbs, so the space available for a knee actuator is very limited. Form factor and size are thus key concerns in this design. So are energy efficiency in a battery-powered device, power ratings, and cost reduction.
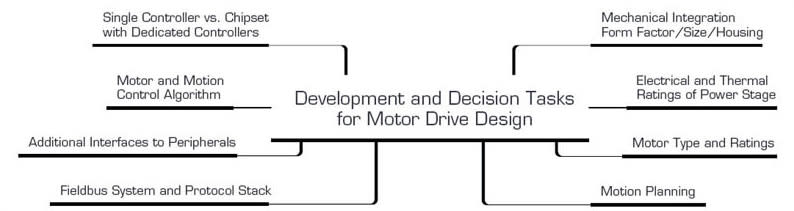
1. Selecting a Motor Control and Motion Control Algorithm
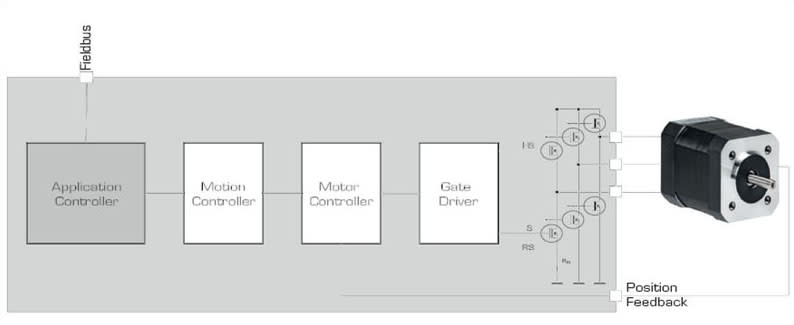
One of the first tasks during the development of a motor drive is selecting and implementing a motor control algorithm. Field-oriented control (FOC), also called vector control, is widely used for motion control (see Figures 1 and 2). It’s also the most energy-efficient algorithm for driving a motor. It is normally implemented in software, but implementing it that way requires a lot of time, up to several years, especially if an engineer is working with it for the first time.
For a previous generation of the Power Knee, Össur had used a motor drive module that utilized a different control algorithm known as block commutation. From the point of view of energy efficiency — very important in battery-powered systems in terms of operating time and low thermal power dissipation — FOC commutation is much better than block commutation.
Össur was also struggling with the obsolescence of its brushless motor driver, and was trying to upgrade to an alternate product from its previous provider. The old motor exhibited significant performance loss, mainly a rise in motor temperature. This dilemma did not seem to be solvable at that point in time. Since its design team was working under very tight constraints for size, form factor, power ratings, and efficiency, the company became interested in a custom solution based on hardware IP blocks.
Trinamic Motion Control had already implemented the complete FOC algorithm, which normally requires expensive high-resolution encoders, in hardware as IP blocks. But for block commutation control, only digital Hall sensors are needed. So its challenge was to develop an FOC algorithm that worked with the existing digital Hall sensors.
2. Choosing a Chipset with Dedicated Controllers Versus a Single Controller
Another initial decision is selecting either a custom or semi-custom chipset with dedicated controllers, or an off-the-shelf microcontroller from the hundreds available. Because of the volume alone, it can be difficult to find a commercial device that matches every requirement on the engineer’s spec list. The controller must have the minimum computation power for the application, besides the right voltage and power levels, pin options, package, form factor and size, and price.
Össur wanted to get a customized, fit- and function-compatible component that would interface smoothly with its existing embedded control system and would provide performance levels similar to or higher than its previous off-the-shelf component, at competitive pricing. The ability to refine performance through firmware changes was also a critical expectation in reducing the risks associated with custom hardware development.
The device chosen is a customized FOC servo motor controller realized in an FGPA for torque control, velocity control, and positioning. This digital motion controller has integrated position sensor interfaces and position interpolators, is suitable for three-phase BLDC (brushless DC), and is designed for operating voltages of 1.2, 2.5, and 3.3 V. It provides digital Hall sensors for commutation, as well as analog Hall sensors, an a/b/n incremental encoder, and an analog SinCos encoder.
Instead of paying the price of integrating an off-the-shelf drive amplifier module, where a lot of board-level functions would be duplicated between Össur’s embedded control system and the drive amplifier system, the joint design team merged all duplicated functions and created a system with an unprecedented power density, while minimizing cost and maximizing power efficiency. The customized board-level motor drive solution based on existing FOC hardware IP relieves the application’s microprocessor by taking over all FOC. This eliminated the risks that would normally be associated with the development of controller firmware, as well as the time needed for its validation and testing. Instead, control parameters were adapted to the motor and to the application’s unique requirements.
3. Selecting Additional Interfaces to Peripherals
Compared with digital Hall sensors, which are built into the motor, high-resolution digital a/b/n incremental encoders are very expensive. This adds considerable cost to most small motors, which can be so high that the cost of an optical encoder may exceed the cost of the entire motor. Beyond the motor control algorithm itself, a high engineering effort is also required for designing interfaces for peripherals when using digital encoders. In this application where form factor is critical, even more important is the fact that digital a/b/n incremental encoders must be mounted on the back so they need additional space, which was clearly not possible.
For best performance, the FOC algorithm requires precise knowledge of the motor’s rotor angle, which is normally achieved by high-resolution encoders. The motor’s digital Hall sensors would be a cost-effective alternative, but using them would require advanced signal processing of their signals. The customized device’s FOC hardware block is equipped with the ability to interpolate digital Hall signals, making it possible to extract precise interim positions from the digital Hall sensors similar to the precision level that is possible with high-resolution digital encoder signals.
4. Choosing a Control System and Communications Protocol Stack
Communication between the application’s CPU and the FOC hardware is via the serial peripheral interface (SPI). This was chosen because SPI is a simple interface provided by almost any processor. In general, a communications protocol stack may be better handled by software within a processor. From the software point of view, the FOC hardware is a register set with an SPI communication interface for register access.
5. Deciding Mechanical Integration Form Factor/Size/Housing
This was an especially important decision, since form factor and size were critical to the application. Normally, FOC implementations are built for industrial uses, which means an optional rack mount is mandatory, requiring a big box. Furthermore, the drivers are usually designed to drive several amps, which results in significant power losses in the driver stage. Therefore, an external heatsink is also mandatory, and most manufacturers use the housing as a heatsink. This would clearly not be possible with a prosthetic that needed to be so small.
The challenge was therefore to shrink the size of the motor drive module’s printed circuit board (PCB), which was reduced to 65 × 40 mm, between 1/10 and 1/3 the size of typical FOC boxes or servo vector controllers. This was done by implementing the FOC algorithm in a very hardware-efficient form, based on prior experience in the implementation of real-time critical algorithms in hardware, together with prior experience in the implementation of motion control algorithms in software.
Connectors are standard screw terminal connectors, defined by Össur so that the whole knee can be easily assembled in production. The power supply consists of 12 Li-Po cells, with a nominal voltage of 44.4 V. Although the maximum voltage is 50.4 Vdc (charging circuit voltage), the MOSFETs are designed for 60 V in order to recuperate as much energy as possible in e-caps. Recuperation into the battery is not possible since this would significantly shorten battery life.
6. Determining Electrical and Thermal Ratings of the Power Stage
This was also an especially important decision. Since the knee is battery powered, the battery has to last a long time and the electronics need to stay cool. The MOSFETs and other parts of the motor drive that heat up the most had to be carefully placed so that heat is spread out and distributed around the motor drive module’s PCB. Also, the mechanics had to be designed so the Power Knee’s frame is connected to the electronic parts on the PCB that heat up the most, so heat gets out of the PCB and onto the frame where it can dissipate.
Overcoming the size restriction challenges and not surpassing the basic geometry of the Power Knee required fitting a motor controller with a peak output of 500 W into an area of no more than 65 × 40 mm. Managing power dissipation in such a small space requires a good thermal connection to the aluminum structure, so several designs including active-multilayer topologies were developed in parallel, and compared with functional models. These experiments resulted in the selection of a design with surface-mounted circuit breakers with optimal thermal connection to the housing.
7. Determining Motor Type and Ratings
Determining motor type and ratings is usually an important decision during development of a motor drive, especially when engineers are developing it from scratch. In this case, however, the Power Knee’s motor was custom made, and its current ratings had already been determined by Össur.
8. Determining Motion Control Planning
The challenge for Össur was how to control the knee with higher-level algorithms so that it moves with a natural motion. Össur did the complete motion control planning. Trinamic’s challenge was to transfer the digital information generated by Össur’s electric prosthesis control system into physical motion, while meeting the requirements of Össur’s existing solution.
This article was written by David Langlois, Technical Product Lead – Knees, Össur, Reykjavik, Iceland, and Mario Nolten, Field Application Engineer, Trinamic Motion Control, and Dr. Lars Larsson, IC Designer and Chief Operating Officer, Trinamic Motion Control, Hamburg, Germany. For more information, Click Here .

