
Osso VR , a validated virtual reality (VR) surgical training platform, has announced a first-of-its-kind VR training module for Smith & Nephew’s NAVIOTM Surgical System . The system is being demonstrated at the American Academy of Orthopaedic Surgeons (AAOS) 2019 Annual Meeting March 12–16.
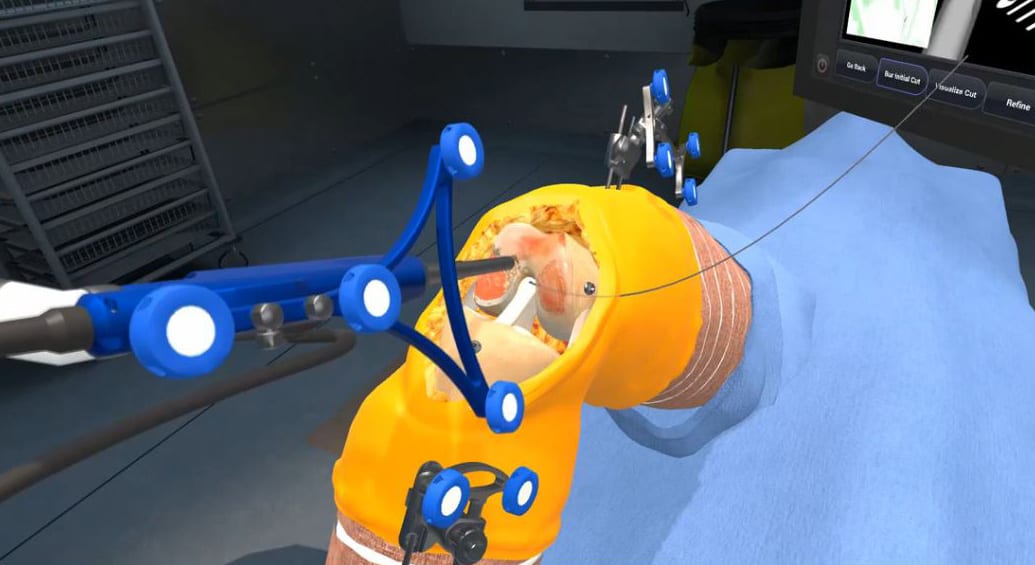
Handheld robotics and virtual reality are emerging technologies in medicine leading to rapidly advancing changes in areas, such as surgery, to provide repeatable and efficient high quality outcomes. Osso VR’s custom virtual training module for the NAVIO Surgical System, the only robotics platform with handheld technology, is the first application of this type of immersive coaching for a robotics-assisted device.
“NAVIO is a natural fit for virtual training and assessment as it involves robotics-assisted surgical steps coupled with a novel software interface, and Osso VR has demonstrated success instilling confidence in the technology of similar procedures,” says Justin Barad, MD and CEO of Osso VR.“As this technology becomes increasingly powerful and pervasive, we plan to continue to support its growth through a growing curriculum of virtual training. Smith & Nephew is the perfect partner for this groundbreaking approach given their dedication towards innovation and helping patients live life unlimited.”
Smith & Nephew offers the largest knee portfolio enabled by robotics and is the only company that offers the accuracy (with the use of the handpiece)1–9 of robotics-assisted technology for bi-cruciate retaining total knee implant (JOURNEY II XR). The NAVIO Surgical System is a next-generation handheld robotics platform, providing high levels of accuracy1–9 in an easily expandable robotics platform.
Unlike other robotics-assisted platforms, the NAVIO system eliminates time, costs, and radiation exposure associated with preoperative CT imaging, allowing for real-time imaging in surgery to build a patient-specific 3D model. It also eliminates preoperative logistics for physicians and staff and has a lower cost of ownership10 compared with other robotic-assisted platforms in the market.
Osso VR’s scientifically validated training platform is designed for surgeons, sales teams and other trainees to address new techniques and increase confidence through learning for new medical devices. The technology provides realistic, haptic-enhanced interactions in an immersive training environment. The company’s surgical training technology provides on-demand, educational experiences that are effective, repeatable, and measurable to help the surgeon reach proficiency with the device.
The virtual reality training experience for the NAVIO system will be demonstrated at the Smith & Nephew booth #3421.
Further Reading
- 1. Herry Y, Batailler C, Lording T, Servien E, Neyret P, Lustig S. "Improved joint-line restitution in unicompartmental knee arthroplasty using a robotic-assisted surgical technique." Int Orthop. 2017;41:2265–2271.
- Batailler C, White N, Ranaldi F, Neyret P, Servien E, Lustig S. "Improved implant position and lower revision rate with robotic-assisted unicompartmental knee arthroplasty." European Society of Sports Traumatology, Knee Surgery, Arthroscopy (ESSKA) 2018.
- Gregori A, Picard F, Lonner J, Smith J, Jaramaz B. "Accuracy of imageless robotically assisted unicondylar knee arthroplasty." Paper presented at: International Society for Computer Assisted Orthopaedic Surgery; June 17–20, 2015; Vancover, Canada.
- Gregori A, Picard F, Bellemans J, Smith J, Simone A. "Handheld precision sculpting tool for unicondylar knee arthroplasty." A clinical review. Abstract presented at: 15th EFORT Congress; June 4–6, 2014; London, UK.
- Smith JR, Picard F, Lonner J, Hamlin B, Rowe P, Riches P, Deakin A. "The accuracy of a robotically-controlled freehand sculpting tool for unicondylar knee arthroplasty." Congress of the International Society of Biomechanics. 4–9 August, 2013. Natal, Brazil.
- Jaramaz B, Nikou C, Casper M, Grosse S, Mitra R. "Accuracy validation of semi-active robotic application for patellofemoral arthroplasty." Paper presented at: International Society for Computer Assisted Orthopaedic Surgery; June 17–20, 2015; Vancover, Canada.
- Mitra et al. "Accuracy Assessment of a Novel Image-Free Handheld Robot for Knee Arthroplasty in Bi-Cruciate Retaining Knee and Total Knee Replacement – A Cadaveric Study." World Arthroplasty Congress 19–-21 April, 2018. Rome, Italy.
- Jaramaz B, Mitra R, Nikou C, Kung C. "Technique and Accuracy Assessment of a Novel Image-Free Handheld Robot for knee Arthroplasty in Bi-Cruiciate Retaining Total Knee Replacement." EPiC Series in Health Sciences. 2018;2:98–101.
- Jaramaz B, Mitra R, Rovinsky D, Neginhal V. "A Novel Image-Free Handheld Robot For Bi-Cruciate Retaining Knee Arthroplasty." Poster presented at: 19th EFFORT Annual Congress; May 30–June 1, 2018; Barcelona, Spain.10. Data on file Smith & Nephew. Sg2 Healthcare Intelligence: Technology guide. 2014.

