Due to advances in electronics and technology, robotic surgery has become increasingly popular. Surgeons no longer have to operate directly on a patient, but instead can control a robot to carry out the procedure. Robotic surgery has benefits to both the surgeon and the patient. For the surgeon, robots display 3D visualization for enhanced viewing of the operative area and improve the control, precision, and range of motion of smaller instruments. While robotic surgery may seem like the future of the medical industry, it still has obstacles to overcome. One significant disadvantage to robotic surgery is the lack of haptic technology, which provides physical sensations that enable electronics to give their users force feedback.
Because many medical devices and surgical tools, such as grippers and laparoscopic instruments, do not provide tactile sensation, there is no way for a surgeon to sense how much force is being applied when using the instrument during robotic surgery. The loss of tactile feedback limits the range of surgical techniques and affects the surgeon’s dexterity. Often vibration is used to mimic sensation but you don’t want to introduce vibration into a delicate procedure.
Cambridge Research & Development, a pioneer in developing non-invasive, haptic man-machine interfaces that provide tactile force feedback, has recently completed research on a new haptic robotic interface to overcome this challenge. This innovative new device receives force feedback from a force-sensing resistor (FSR) integrated into an instrument and provides an enhanced level of tactile feedback. This force feedback allows robotic operators to perform surgical operations that had previously been problematic and dangerous.
The interface, called the Neo, uses linear actuation to provide force feedback and mimics the sensation of force through a device that can be worn anywhere on the surgeon’s body.
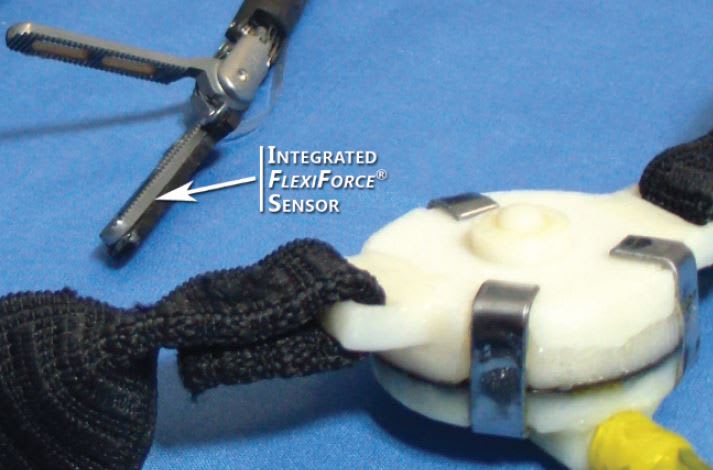
A very sensitive and paper-thin FlexiForce® sensor, developed by Tekscan®, Inc, was placed in the front fenestration of a double fenestrated grasper. This sensor-enabled grasper is connected to the haptic interface worn by the surgeon. The FSR can then measure applied force, which is read by the haptic interface and translated into pressure applied by the device through the use of a mechanism that moves up and down in response to force. (See Figure 1) The brain rapidly associates the pressure being applied by the Neo with a sense of touch, enabling the surgeon to adapt his or her use of force in response to pressure from the Neo.
The integrated sensor is so small and thin, it is possible for the device to provide a full range of tactile sensation without having to increase the size of the instrument being used. Sensors can be produced in a variety of shapes and sizes to meet a wide range of design requirements, making it easy to integrate into a device. And, unlike load cells and strain gauges, these sensors do not require complex electronics to obtain output data.
“The robotics industry understands that the true potential of robotic and cybernetics lies in the ability of man and machine to meld,” said Ken Steinberg, CEO of Cambridge Research & Development. “Full bio-compatibility is in our future but advancements have to be made now if we are truly going to realize the potential of our robotic counterparts. With this new haptic interface, we feel we are providing a solution that will lead to new and exciting capabilities from the surgery room to space.”
This article was written by Maura Logan, Marketing Specialist, Tekscan, Inc., South Boston, MA. For more information about Tekscan sensors, visit http://info.hotims.com/45606-168 . For more information about Cambridge Research and Development, visit http://www.cambridgerad.com .

