Scientists have developed a way to deploy magnetic miniature robots through a 3D matrix resembling a network of blood vessels. This new method could one day enable the simultaneous treatment of multiple locations in hard-to-reach areas of the human body
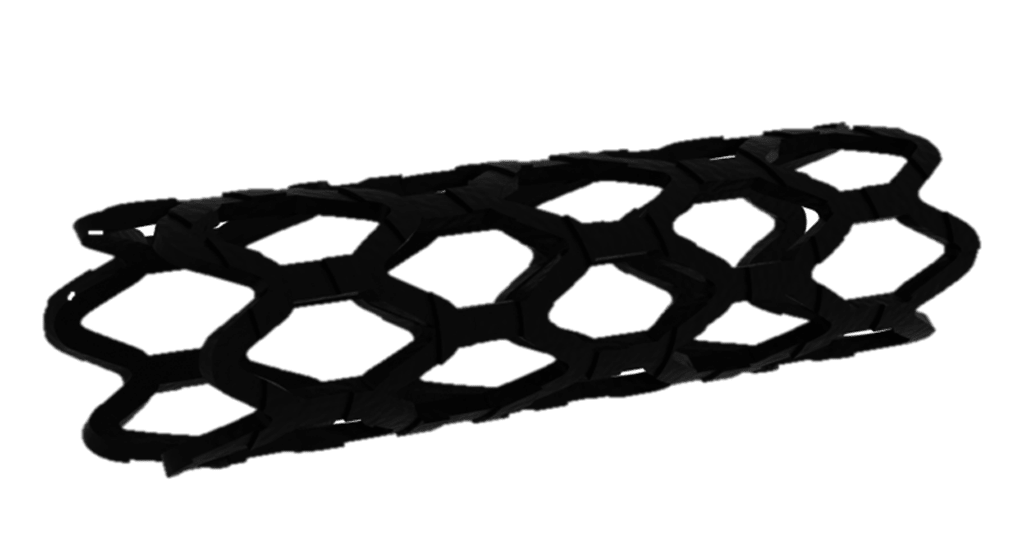
The robotic system deploys the 5-mm-sized robots to deliver drugs or redirect the fluid flow at multiple locations inside a 3D lumen network. The controlled object is a magnetic robot in the shape of a stent, designed to flexibly adapt to changes in the lumen. To navigate through the network of lumens, the robot needs a strong magnetic force to overcome friction and fluid flow.
If the force is insufficient, the robot is unable to move forward. By reducing the magnetic force on unwanted robots while increasing it on the desired robot, one robot can be enabled to move while the others remain stationary.
The robot is controlled by a rotating permanent magnet, with proposed influence and rotation regions to enhance usability. Placing the magnet outside the influence region disables unwanted robots, while positioning it within the actuation region activates the target robot, providing intuitive control for the operator. In practice, the user simply enters the target points and a robotic arm uses a path-planning algorithm to automatically deploy the robots, making the system user-friendly and easy to implement.

