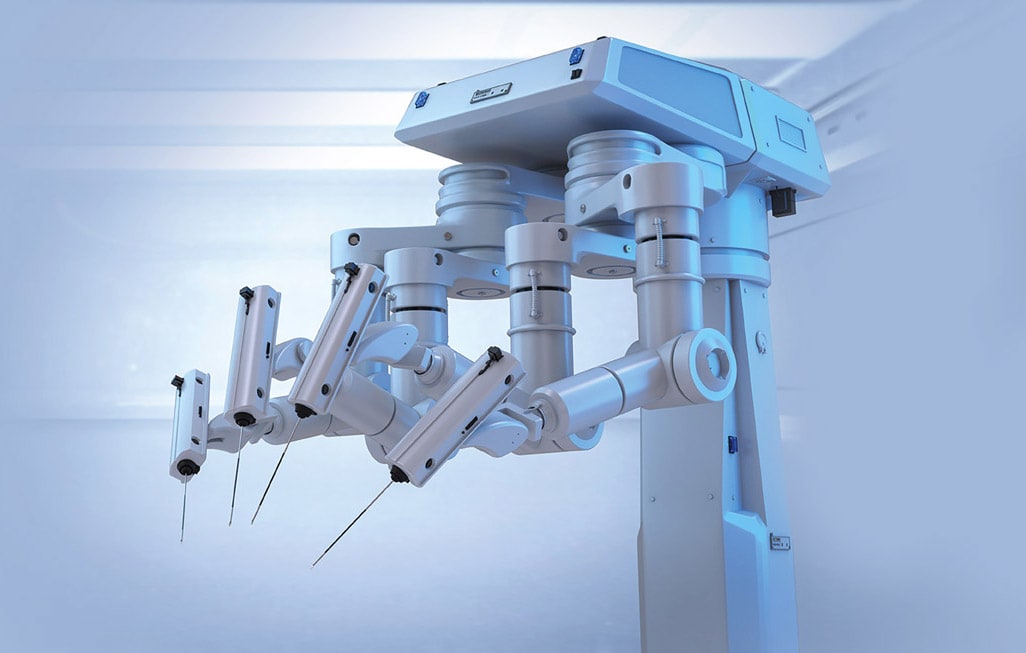
Robots are increasingly becoming a viable option for people requiring an operation, and in many cases are even preferred over a surgeon’s hand. Thanks to precision motion components, along with advanced software and vision systems, robotic surgery procedures are becoming more and more advanced. When designing robotic arms, control consoles, or end effectors, it is critical to be certain that linear guides and crossed roller bearings (CRBs) will satisfy the stringent accuracy and motion requirements that these ever more sophisticated procedures demand.
To ensure that bearings deliver optimal performance, it’s essential to understand their importance to translation, control systems, and end effectors within surgical robotics along with the characteristics to look for when specifying them.
Precise Motion and High Performance for Translating Mechanisms
Multiple robotic arms are often involved in a single surgery, so arms and rotating mechanisms must move in sync. Without bearings that move with precision and control, arms and instruments may collide or make accidental contact with organs or tissues. With surgical success and patient safety riding on bearings that realize the translation of these robotic appendages, repeatable and consistent performance is essential. Following are some of the fundamentals and key requirements to consider.
Linear Guides
Eliminating risks like collisions and unintended patient contact makes positioning accuracy a critical requirement for linear guides in robotic arms. Also, bear in mind that not all linear guides can move from point to point smoothly — a characteristic that is more important than speed in surgical robots. A desirable linear guide will have a low, uniform sliding resistance over its travel distance. Finally, small size is a frequent requirement in surgical robots, and some compact linear guides have greater load capacities than other likesized units. Therefore, consider a linear guide that is compact relative to the load it must carry.
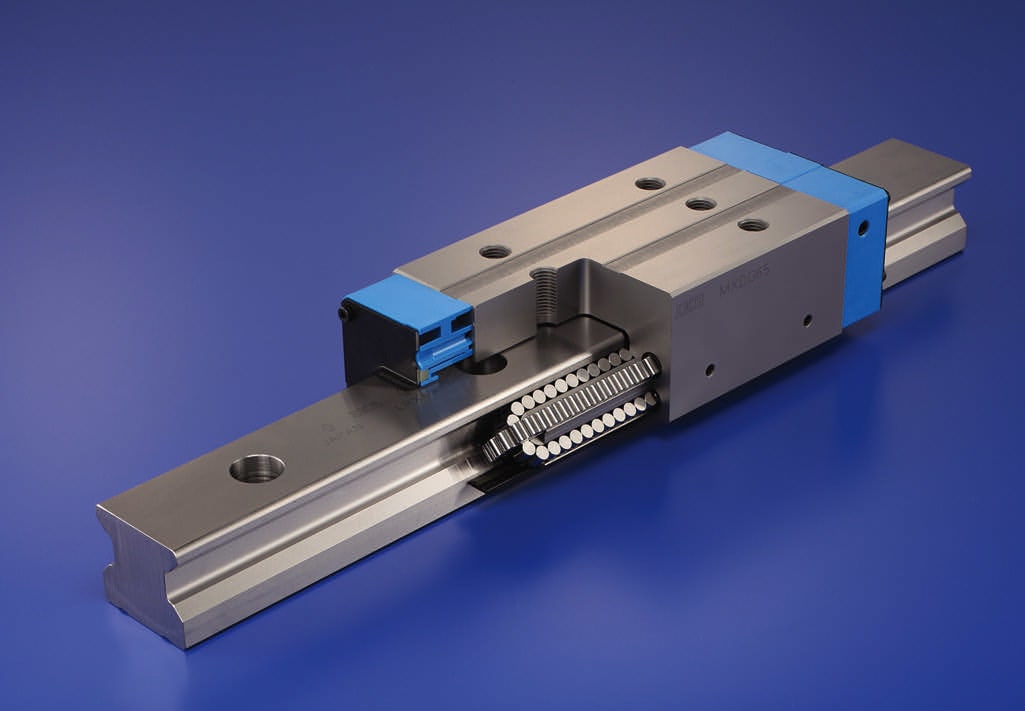
Two linear guide designs offer precision features that are especially suitable for surgical equipment. Recirculating ball-type linear motion rolling guides, for example, are structured with two rows of balls that make contact with the raceway at four points, allowing them to deliver high stability and accuracy — even when the load direction or complexity varies, especially those with well-controlled preload. They also operate quietly. For example, this two-row arrangement is included in linear guides, such as IKO’s LWLF2. Such guides deliver the low sectional height along with a 2-mm track width and a slide unit width of 5 mm. Stainless-steel construction is also standard, making the guide ideal for applications where rust prevention oil can’t be used.
Another design, rolling-type linear motion guides, has four rows of cylindrical rollers arranged in parallel inside a highly rigid carriage. The rollers contact the raceway over a large area, resulting in high rigidity, high load capacity, and smooth motion. Since roller-type guides can handle higher loads, it may make sense to select a size or two smaller — an attractive consideration in space-constrained robotic arms.
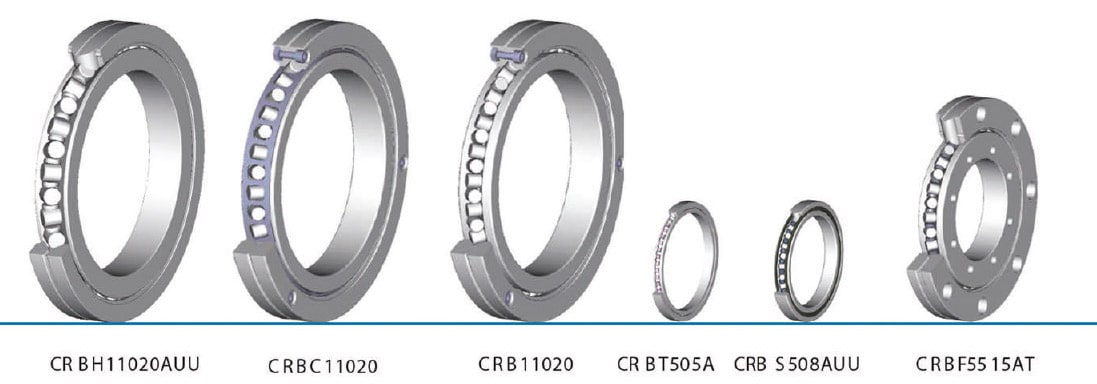
Crossed Roller Bearings
Robotic arms ultimately need to get the surgical instrument into place, and CRBs’ within the robotic joints pivot the arm to accomplish sophisticated positioning tasks. They feature a large orthogonal array of rollers that create a large contact area, lowering deflections under load and reducing elastic deformation. These characteristics give CRBs both the high rotational accuracy and compact size that are ideal for robot joints. As with linear guides, look for high accuracy, smooth motion, rigidity and repeatability.
CRBs Give Surgeons a Steady Robotic Hand
Robotic surgery wouldn’t be surgery without … the surgeon. But that doesn’t necessarily mean the surgeon is in the operating theater with the patient. They can be in the next room — or possibly anywhere in the world — controlling the robot arms and instruments via a “wristed” console. At the console, the surgeon’s hands turn and maneuver rotating hoops, joysticks, or handles. CRBs ensure that these inputs move smoothly and with precision so that the control software can translate the gestures and scale them into the robotic arm’s actual movement.

CRBs are well-suited for surgical robot controls because the inputs — especially hoop-type inputs — can impose different loads onto the bearing with the surgeon’s various gestures. To manage this, CRBs handle radial, thrust and moment loads simultaneously in a single unit. Additionally, CRBs offer precision and versatility — all in a compact size. That’s because the rollers are arranged in an orthogonal array, and just one bearing can take multi-directional loads. This arrangement takes up less space than other bearing types and makes CRBs ideal for mechanisms within tight confines, such as wrist and arm motion joints.
CRBs exhibit lower rotational torque than that of plain bearings and some multi-point-contact ball bearings, and the difference between the static torque and the dynamic torque is minimal. As a result, crossed roller bearings can help machines achieve high precision, consume less power, and limit operating temperature increases for greater overall efficiency.

Where,
T : Rotational torque, N • mm
μ : Friction coefficient (Approx. 0.010)
Por : Static equivalent radial load, N
d : bearing inside diameter, mm
D : bearing outside diameter, mm
Another critical requirement for robotic surgery control consoles? Good tactility. Because only a portion of the surgeon’s finger or hand is translated through the robot, the console requires a proper bearing that will allow the hoop input’s movement and rotary motion but not introduce any “play” that could otherwise affect the translation. In order to provide the surgeon with the exact tactile feel necessary to perform the manipulation, preload management is essential. It also prevents zero-resistance conditions that can otherwise cause input devices to over-rotate.
Companies such as IKO can also customize CRBs with factory-adjusted preload to create the right tactile feel for the surgeon or create higher-precision grades with superior rotational accuracy. Engineers can review the requirements to help select the right CRB that will help surgeons perform their robotic procedure with the greatest dexterity possible.
Various CRBs come in compact and slim sizes to fit tight spaces within the controllers, while other units combine the inner and outer rings into one solid piece to create a rigid unit that has greater precision while also economizing space and weight.
Compact CRBs Keep End Effectors Small and Nimble
Inside the end effectors that handle the instruments and imaging devices, CRBs not only must enhance the surgeon’s dexterity and avoid harmful collisions, they must also fit into increasingly smaller designs. CRBs are well-suited for end effectors because they can achieve the precise rotary motion these appendages need with just one compact bearing.
As previously noted, CRBs are designed with rollers alternately crossed at right angles to each other between inner and outer rings to make greater contact with the raceways for even, multidirectional load distribution. Not only does this arrangement ensure precise positioning and smooth motion for complex tasks, it also helps keep size requirements to a minimum — two key considerations for end effectors. CRB design elements can be enhanced for ever-shrinking end effectors in surgical robots:
Small outside diameters. Bearings should have a small outside diameter, compared to the bore diameter, and a narrow width.
Slim units with separators. Designed to suit the tightest space requirements, Slim CRBs with separators between the rollers can economize driving power and also allow for even smoother motion. One example, IKO’s Super Slim CRBTs, are just 5.5 mm high and 5 mm wide.
Pre-drilled holes. CRBs can be specified with pre-drilled mounting holes to eliminate the need for special housings or fixing plates, which saves valuable space in the end effector design and reduces overall cost.
Specifying an ideal CRB for a surgical robot end effector often comes down to determining the smallest unit to carry out the function and load with the highest precision.
Prevent Contamination Issues
When selecting a motion component, keep the following best practices in mind. For any medical or surgical application, it’s critical to use high-quality steel that resists corrosion and stands up to cleaning solutions. For linear guides, consider guides with standard stainless-steel construction. Linear guides can also be accessorized with stainless steel slide unit casings, track rails, end plates and cylindrical rollers.
Another option, black chrome, effectively safeguards linear guides against rust on track rail and slide units and, when combined with a layer of fluorinated resin, will prevent foreign substances from sticking to the parts. CRBs also offer stainless steel versions upon request, and they can be outfitted with synthetic rubber seals to prevent contamination.

Look for High-Precision Components, Extensive Expertise
Mitigating robotic surgery risks often comes down to the precision and performance of your motion components. That’s why it’s important to work with a motion component manufacturer that is known for quality products with these attributes. Choose a manufacturer that has a long history of providing high-quality motion components for medical applications.
This article was written by Karl Wickenheisser, Vice President, Sales & Marketing, IKO, Wilmington, DE. For more information, contact:

