Researchers have developed a haptic device capable of reproducing the softness of various materials, from a marshmallow to a beating heart, overcoming a deceptively complex challenge that has previously eluded roboticists.
Robotics researchers have tried to address this challenge with haptic devices, but previous attempts have not distinguished between two primary elements of softness perception: cutaneous cues (sensory feedback from the skin of the fingertip), and kinesthetic cues (feedback about the amount of force on the finger joint).
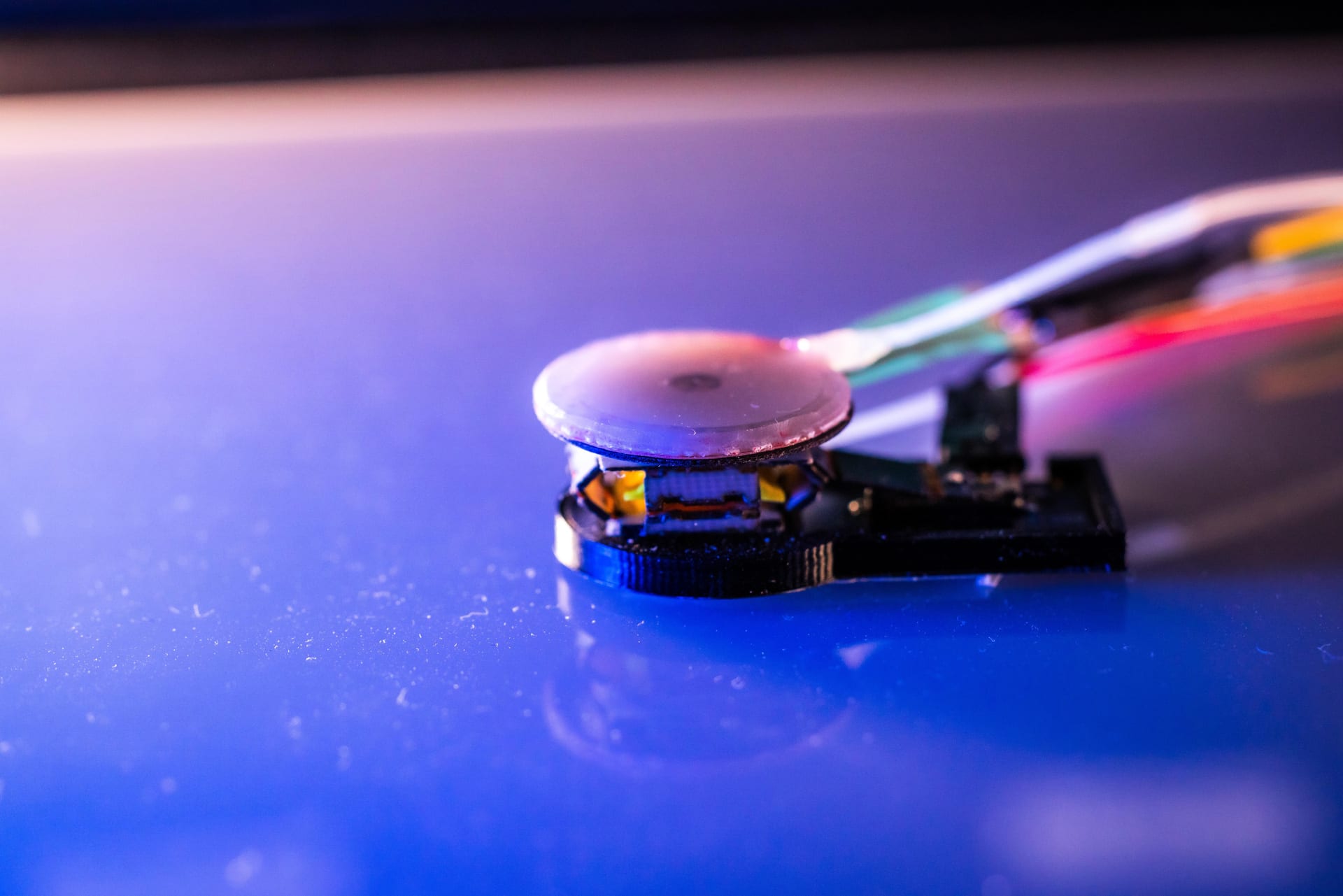
SORI (Softness Rendering Interface) has achieved this by decoupling cutaneous and kinesthetic cues, SORI faithfully recreate the softness of a range of real materials, filling a gap in the robotics field and enabling many applications where softness sensation is critical, including robot-assisted surgery.
With this novel decoupling of kinesthetic and cutaneous functionality, SORI succeeded in recreating the softness of a range of materials. It also mimicked materials with both soft and firm attributes (such as a biscuit on top of a marshmallow, or a leather-bound book). In one virtual experiment, SORI even reproduced the sensation of a beating heart, to demonstrate its efficacy at rendering soft materials in motion.

