A number of medical applications need high-speed actuation in the lower load band. Many OEMs use pneumatic actuators or electric solenoids for this purpose; however, these options do not provide precise positioning. And, although more expensive technology such as servo pneumatic positioning systems are available, accurate positioning at high speeds is still difficult with pneumatic systems.

High-speed linear actuators that use disc magnet motor (DMM) technology, however, provide excellent linear speed for low-load applications such as sensor movement, positioning a laser beam, pick and place of electronic components, movement of XY tables, and other applications. Quiet operation and lower operating and maintenance costs make electric DMM linear actuators a viable option for these high-speed, low-load applications.
Linear Actuators
Pneumatic cylinders with control valves have been an indispensable part of the automation industry and still play an important role as linear actuators. Pneumatic cylinders are suitable for a variety of automation applications at high speed or high loads.
Despite many advantages, however, pneumatic cylinders still face some fundamental problems, which leads designers and engineers to explore alternative solutions. It is always difficult to position pneumatic actuators precisely under load due to the compressible nature of air, especially at high speeds. The high cost of operating these systems can be attributed to substantial electricity waste from idling compressors and leakages in the pipelines.

Electric actuators, on the other hand, have many advantages over air cylinders even though the load and speed capabilities are lower. Most of these linear actuators use a screw-and-nut mechanism to convert the rotary motion into linear movement.
Depending on the load and speed requirement of the application in conjunction with other factors, various electric motors can be used as a prime mover. This article examines motors that are suitable for high-speed linear actuation. Due to its precise positioning capability, only the stepper motor is discussed.
The four block matrix in Figure 1 shows a broad classification of linear actuators based on load-lifting capability at various speeds. A linear speed of over 500 mm/s can be considered as a high-speed range. Can stack motors are widely used as linear actuators in the low-load/low-speed segment because of their reliability and cost-effectiveness. Hybrid stepper motors are well known for their high load-lifting capacity over other stepper technologies and are the best choice for high-load/low-speed applications. The remaining low-load/ high-speed segment is the focus of this article.
Disc Magnet Motor

The disc magnet motor, often called the turbo disc motor, is an ideal choice for high-speed applications with low loads. As the name suggests, DMM uses a thin magnetic disc to generate the torque output of the motor. Because of its low rotor inertia, it provides an exceptionally high acceleration for a given torque, which is suitable for most of the high-speed demands. Its advantages are not well known, and so it is often overlooked as an option. Figures 2a and 2b are typical examples of a linear actuator that could be designed from existing DMMs. The designs can be either a rotating screw as in Figure 2a or a rotating nut as in Figure 2b. Figures 3 and 4 show the performance of a DMM actuator for various lead screw combinations. These actuators provide a wide range of speeds in the low-load region between 0 to 1200 mm/s, which is quite wide compared with a hybrid stepper motor or can stack motor of same frame size.
The key parameters that determine the performance of any motor at higher speeds are dynamic torque capacity, rotor inertia, load-to-motor inertia mismatch, iron losses, and perfect sinusoidal shape of output torque curve. Figures 5a and 5b show that the dynamic performance of the hybrid motor drops drastically as the speed increases, whereas the DMM maintains its output consistently at a higher speed. The perfect sinusoidal waveform of the output torque gives a maximum amplitude for the torque ripple to improve the dynamic performance. Iron losses are the function of input frequency, which means the losses would be higher at higher speeds. But because of the shorter magnetic circuit and proper flux path, the DMM shows less iron loss and hysteresis loss compared with hybrid motors. These low losses and the lower electrical time constant help the DMM operate at higher speeds.

As mentioned earlier, the unique rotor design of the DMM keeps the inertia exceptionally low compared with a hybrid stepper. For a given frame size, 40 × 40 mm, the rotor inertia of DMM is as low as 3 gram-cm2, which is 15 times lower than similar sized hybrid motors. This translates to the acceleration being 15 times higher for a given torque output. The rotor inertia mismatch is also an important selection criterion for high-speed actuation.
The following example illustrates how suitable a DMM motor can be in case of load inertia mismatch challenges. A load of 250 g is to be moved to a distance using a lead screw of Ø6 × 80 mm long with a lead of 10 mm. How do we calculate load inertia reflected on to the motor? Efficiency can be considered roughly as 40 percent and the material for lead screw is stainless steel. The total inertia reflected to the motor (Jtotal) = load inertia (Jl) + lead screw inertia (Jls).
Jl and Jls can be calculated as follows:
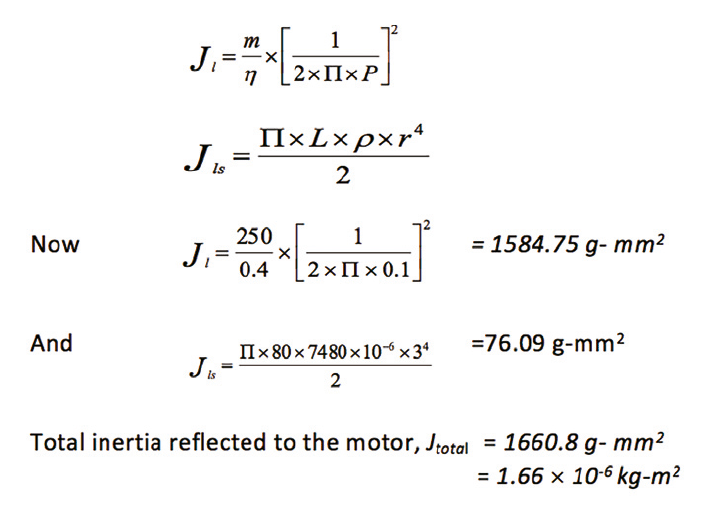
- m = Mass in grams
- L = Length of lead screw
- r = Radius of lead screw
- P = Pitch in revolution/mm
- μ = Efficiency
- ρ = Density in kg/m3

In order to have a smooth power transmission from the motor to the output load, it is important to match the rotor inertia to the reflected load inertia, especially for high-speed actuation. Now, looking at the standard rotor inertia of DMM motor, the P532 motor comes closer to this value, i.e., 1.2 × 10-6 kg-m2.
Conclusion
A number of medical applications need high-speed actuation in the lower load band. High-speed linear actuators that use DMM technology provide a great alternative to pneumatic actuators or electric solenoids for achieving excellent linear speed for low-load medical applications. The DMM uses a thin magnetic disc to generate the torque output of the motor. This low rotor inertia provides an exceptionally high acceleration for a given torque, which is suitable for most high-speed demands.
This article was written by Sandeep Cg, Assistant Manager of Design and Development for Portescap, West Chester, PA. For more information, click here .

