

Ultrasonic handpieces are being used with growing frequency in medical applications, for example, with minimally invasive surgical procedures and in dentistry. These instruments, which include ultrasonic scalpels, phaco handpieces, and scalers, use acoustic waves to facilitate the processing of hard or soft tissue. Part 1 of this article looks at the general structure, design variants, and system design of ultrasonic medical handpieces. In a future issue, Part 2 will examine driver design, special applications, drive electronics, and failure mechanisms.
Targeted Heat Generation
Hard tissue, such as bones or teeth, can be machined with drills or burs, for example, during oral surgery. In this case, ultrasound is used to facilitate the mechanical processing by means of additional shocks or cavitation. Depending on the selected working frequency, tissue can be processed faster, and also more selectively, such as to protect blood vessels in the surrounding area. When working on soft tissue, such as muscles, the targeted generation of ultrasonic waves allows the blades of a scalpel to oscillate in a defined manner at very high frequencies.
Targeted heat generation — due to friction between the tissue and the surgical instrument — facilitates rapid cutting of tissue with simultaneous coagulation (see Figure 1), which prevents severe bleeding and promotes hemostasis. By applying high energy densities at the surgical instrument’s point of contact, cutting processes during surgery or biopsy are significantly easier as lower mechanical forces and pressure are required. As a result, surgical incisions can be made smaller and with less trauma to the surrounding tissue. This results in reduced postoperative pain as well as shorter wound healing and thus improved patient recovery.
Furthermore, ultrasonic instruments can be used to gently break up hard concretions, such as tartar or kidney stones, with the aid of cavitation and the force of acoustic waves. Soft tissue structures can also be liquefied and suctioned in a targeted and minimally invasive manner, like during cataract operations (phacoemulsification) or wound debridement.

Ultrasonic handpieces of this kind, which are based on piezoceramics, are generally referred to as scalers. Modern scalers consist of a tool and typically include additional functions, such as a light, cooling water, gas supply and suction, which can be integrated into the handpiece and optionally switched on and off as required. Typical applications for ultrasonic scalers include:
Ultrasonic scalpels and tissue sealing tools, for example in vascular surgery for coagulation.
Laparoscopic ultrasonic dissection.
Bone drills and saws, as used in orthopedics and maxillofacial surgery.
Tartar removal.
Intracorporeal stone disruption.
Ophthalmic phacoemulsification
Ultrasound-assisted wound debridement.
For medical procedures in which hard tissue is processed on a larger scale, rotary tools (such as spiral drills) are used as an alternative. To enable faster tissue removal and reduce trauma to the surrounding tissue, these tools can also be supported with ultrasound.
General Structure
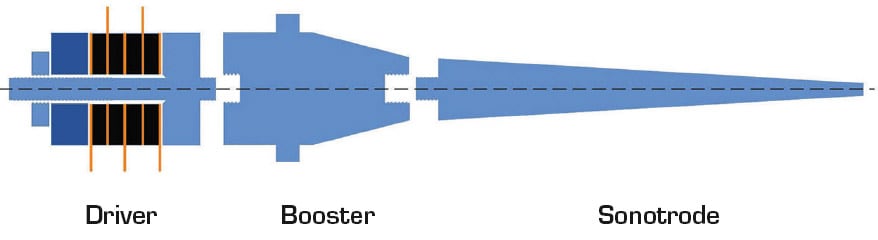
A scaler is a handheld, modular ultrasonic transducer. Scalers usually consist of a driver, a booster and a sonotrode (see Figure 1). The driver, also called the converter, generates ultrasonic waves and usually consists of two or four piezoceramic rings that are screwed together. To prevent overheating during operation of the handpiece, low-loss piezoelectric materials with a high mechanical grade are used, e.g., PIC144, PIC184, or PIC181. These constitute the group of “hard” piezoceramics that are particularly suitable for high-power ultrasonic applications.
The booster serves both as a mechanical amplifier and as a suspension mounting. The gain value results from the volume ratio of the booster sections on both sides of the suspension mounting. The position of the suspension mounting is determined by the neutral level of the vibration in the booster.

The sonotrode (horn) of the handpiece transmits the ultrasound to the tool at the tip, whereby the contact surface of the tool must be at the maximum of the vibration amplitude. The sonotrode also acts as a mechanical amplifier for the amplitude (see Figure 2). The gain value is calculated on the basis of the ratio of the cross-sectional areas at both ends of the sonotrode. In medical technology, working frequencies of 20 to 100 kHz are used and the geometry of the entire scaler is designed accordingly in multiples of half of the wavelength.

This guarantees the maximum amplitude at the tool. The choice of frequency depends on the tissue to be treated: For example, bones can be optimally processed at 20–25 kHz, whereas soft tissue is easiest to process at around 60 kHz.
Extremely high-grade alloys are used for the metallic components in order to keep the mechanical losses to a minimum. Typical materials are titanium, aluminum or steel alloys. The actual choice of material depends on the requirements for the application, such as the desired weight of the scaler and the permissible costs. In addition, various coatings, such as TiN, are used to prevent corrosion or allergic reactions.
Design Variants
For applications in which no variation of the scaler’s gain value or operating frequency is necessary, the driver and booster are combined in a single component. Commercial scalers offer the possibility to freely exchange tools — one scaler can be used for different applications. It should be noted that the tools must be precisely matched to the operating frequency of the respective scalers to ensure optimum operation.
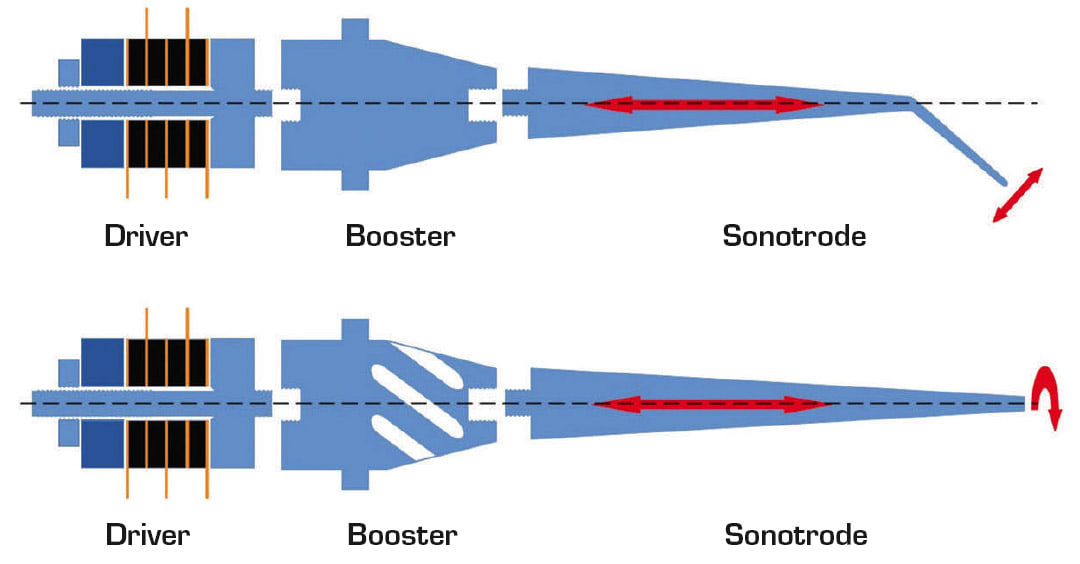
For special applications, non-axial vibrations may also be required. To drill into dense bone tissue, additional torsional motion is advantageous; when sawing soft bones, transverse vibration is required (see Figure 3). The scaler’s functions can thus be optimized and unwanted tissue trauma minimized via relatively simple modifications to the design.
System Design
The overall design of a high-power ultrasonic transducer is simulated in advance using finite element method (FEM) models. Several key properties must be considered when designing a new scaler:
Optimum operating frequency.
Vibration amplitude.
Operating temperature/cooling.
Vibration mode.
The working frequency is primarily determined by the mechanical properties of the tissue to be processed, as well as the type of processing (see Table 1).

The maximum available power input, the strength of the tool material and the treated tissue limit, the maximum vibration amplitude at the tool tip. It is also determined by active cooling of the handpiece, which is usually necessary to enable the operator to work without interruption.
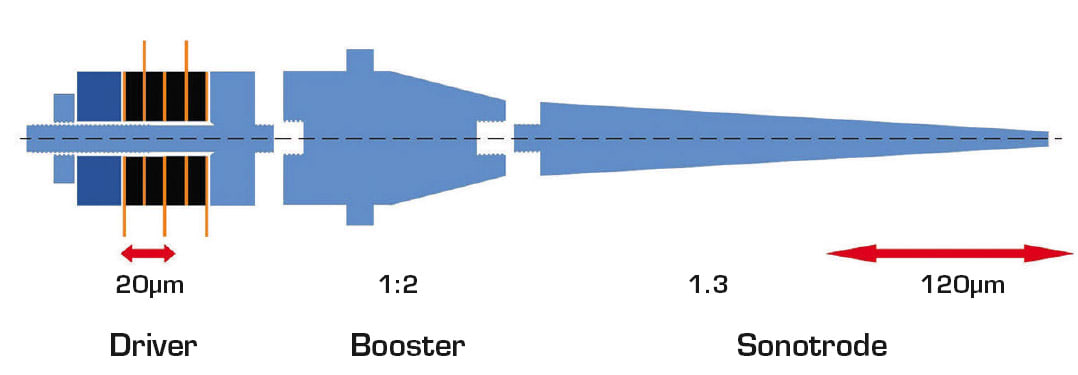
In modular scalers, the amplitude at the tool is first approximated on the basis of the resonant amplitude of the driver and the multiplying factors of the booster and sonotrode (see Figure 4). However, this is a vast oversimplification, and, for medical applications, should always be verified by means of FEM simulation. Depending on the application, adjusting the vibration mode at the tool tip can lead to significant benefits during treatment. For example, by using a torsional vibration, a bone biopsy can be performed faster and with less damage to the surrounding tissue.

Modification of the vibration mode (see Table 2) is accomplished in the simplest case via modification of the tool tip (e.g., the bend angle) and in the most complex case by adapting the design of the transducer, booster and sonotrode. Critical design factors are the areas of maximum strain, temperature control, and precise positioning of the vibration nodes in the scaler.
Ultrasonic handpieces are being used in many applications, from minimally invasive surgical procedures to dentistry. This article reviewed the general structure and system design of ultrasonic handpieces. Part 2 will examine driver design, special applications, drive electronics, and failure mechanisms.
This article was written by Dr.-Ing. Timo Scholehwar, Sr. Design Engineer R&D Piezo Components & Materials, PI Ceramic GmbH, Lederhose, Germany. For more information, contact Stefan Vorndran, VP Marketing for Physik Instrumente L.P., Auburn, MA, at

