Researchers at the Beijing Institute of Technology have unveiled an innovative electrothermal microgripper that promises to improve microelectronics, biomedical engineering, and MEMS applications. With its remarkable deformation capabilities, excellent size compatibility and reliable catch strength, the microgripper enables the manipulation and assembly of micro- and nano-scale objects with exceptional efficiency. This technological advancement is poised to enhance microscale engineering and pave the way for innovations across various high-tech industries.
Microgrippers are essential tools for manipulating minute objects, with applications ranging from medical biopsies to microassembly in electronics. However, traditional microgripper technologies have faced significant limitations, including reliance on complex light sources, high voltages, and bulky magnetic systems. These constraints often hinder their use in confined or specialized microenvironments. The growing need for more versatile, efficient, and user-friendly microgrippers has driven recent research efforts toward overcoming these barriers.
A team of researchers led by Prof. Huikai Xie from Beijing Institute of Technology recently published their study in Microsystems & Nanoengineering. This study was primarily done by Prof. Xie’s PhD student Hengzhang Yang, who is the first author of the paper. Their novel electrothermal microgripper, based on Al-SiO2 bimorphs, combines remarkable deformation and rapid response capabilities while consuming minimal power, offering a promising solution to the challenges faced by traditional technologies.
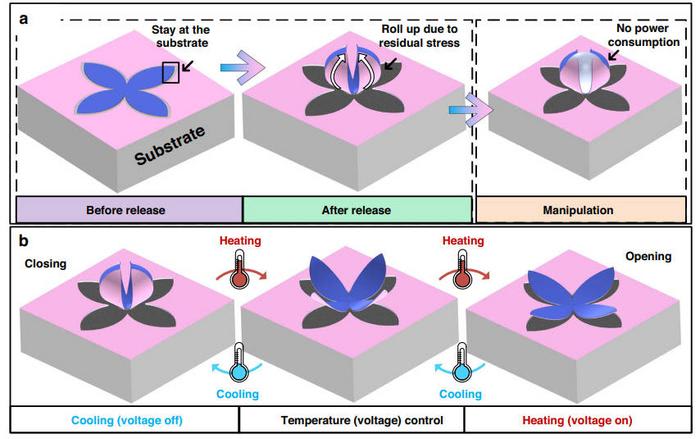
The electrothermal microgripper developed by the team represents a significant leap forward in micro-manipulation technology. By utilizing Al-SiO2 bimorphs as the core structural component, the microgripper takes advantage of the thermal expansion mismatch between aluminum and silicon dioxide to achieve significant reversible deformation.
This mechanism allows the microgripper to naturally close due to residual stresses, enabling it to hold samples without any power consumption. Capable of bending more than 100° at just 5 V, with a response time of under 10 milliseconds, the microgripper delivers impressive speed and accuracy. Furthermore, its ability to grasp and manipulate delicate micro-objects, as demonstrated in tests with PMMA microbeads, proves its robustness. In vibration tests, it successfully endured an average acceleration of 35 g, and in impact tests, it withstood forces exceeding 1600 g, demonstrating its exceptional strength and reliability. These features make the microgripper ideal for precision tasks like pick-and-place operations.
“Electrothermal microgrippers have long been sought after for their potential to simplify micro-manipulation tasks,” says by Shuailong Zhang, a professor participating in the study. “Our design not only meets these expectations but also exceeds them by offering a level of precision and reliability that is unmatched in the field.”
Looking to the future, the potential applications of this microgripper are vast. In the electronics industry, its precision makes it ideal for tasks such as solder bead placement, where accuracy is critical. In the field of biomedical engineering, the microgripper could revolutionize minimally invasive procedures, such as biopsies, by enabling the precise handling of tissue samples. As the technology continues to evolve, it is expected to spur further innovations in microscale technologies, leading to more efficient and advanced micro manipulation systems across a variety of sectors.
For more information, contact Huikai Xie at
Read the full scientific paper.
Overview
The document presents a comprehensive study on a microgripper developed by Yang et al., focusing on its design, functionality, and potential applications in micro-manipulation, particularly in electronic packaging. The microgripper employs an electrothermal driving mechanism using Al–SiO₂ bimorph actuators, which enable significant structural deformation and rapid response times. The study highlights the device's ability to manipulate micro-objects, such as PMMA beads, with high precision, showcasing its grasping strength and operational reliability.
The microgripper is designed with four actuators connected to a PCB board via gold wires, allowing for controlled movement in three dimensions (X, Y, Z) with micron-level accuracy. The manipulation process involves a series of voltage adjustments to capture and transport microbeads, demonstrating the device's effectiveness in handling small components. The authors conducted various tests to evaluate the microgripper's performance, including its response times, which were measured at approximately 8 ms for opening and 10 ms for closing.
In addition to its technical specifications, the document discusses the challenges faced during the design and fabrication processes, such as the need for adequate spacing between actuators to accommodate interconnect routing and minimize fabrication issues. The authors suggest that integrating through silicon via (TSV) technology could enhance the microgripper's design by allowing for more compact actuator arrangements.
The potential applications of the microgripper are significant, particularly in the field of electronic packaging, where it can be used to transport and position solder beads on inductor chips. This capability positions the microgripper as a valuable tool in the assembly of microelectronic devices, where precision and reliability are paramount.
Overall, the study emphasizes the microgripper's advantages, including its ease of operation, large deformation capacity, and resilience to vibration and impact. The findings indicate that this innovative device could play a crucial role in advancing micro-manipulation technologies, paving the way for more efficient and precise assembly processes in various industries. The document concludes with acknowledgments of the research support and contributions from various institutions involved in the project.

